algorithm
AHRS-algorithm from Sebastian Madgwick
- orientation is relativ to the earth
- X-axis points north
- Y-axis points west
- Z-axis lies along the gravitation axis
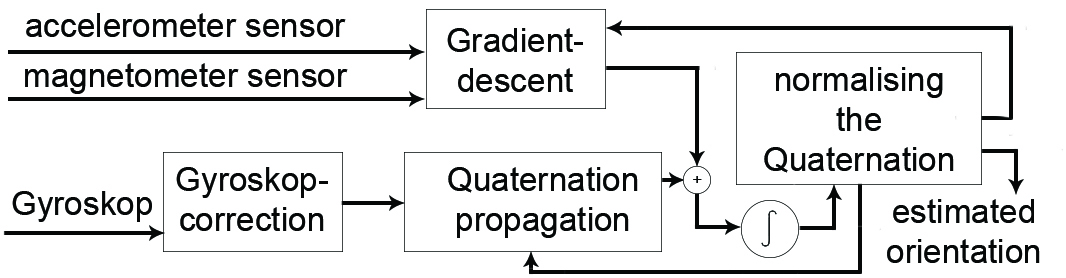
sensor fusion
- combining data from different sensors
- into new and precise measured data and results
- Madgwick: main orientation achieved via the gyroskop, accelerometer and magnetometer compensate its drawbacks