Algorithmus
AHRS-Algorithmus von Sebastian Madgwick.
- Orientierung relativ zur Erde
- X-Achse zeigt nach Norden
- Y-Achse zeigt nach Westen
- Z-Achse liegt entlang der Gravitationsachse
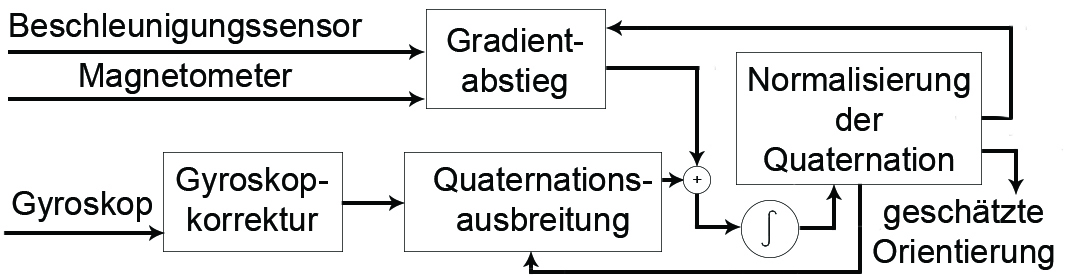
Sensor fusion
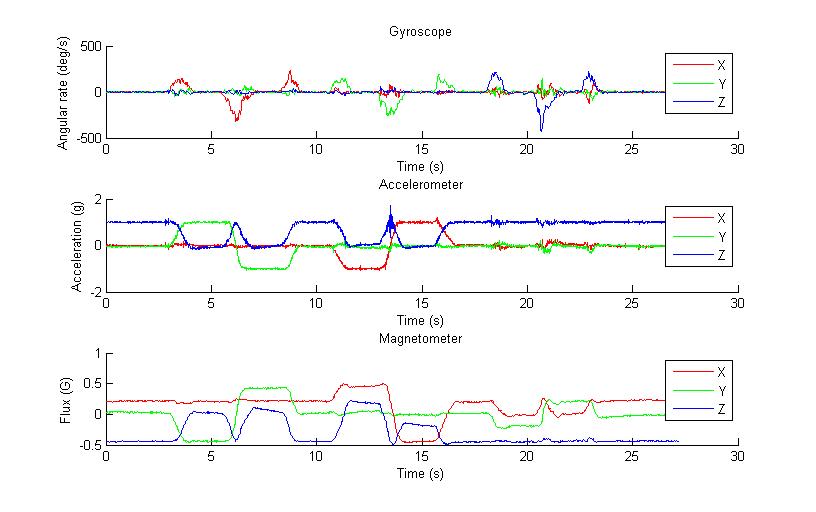
- Daten aus unterschiedlichen Sensoren verknüpfen
- Neues und präziseres Wissen über Messwerte und Ereignisse
- Madgwick: Hauptorientierung über das Gyroskop, Beschleunigungssensor und Magnetometer kompensieren dessen Nachteile